先日掃除していたら、タミヤの「壁づたいメカ工作セット(ねずみ)」というのがあるのを発見しました。
マルツで買って来たらしく、テープが貼ってありました。多分何かいじるつもりで買ったんでしょうけど、よく覚えてないです。
見つけてしまったものはしょうがないんで、とりあえず作ってみることにします。
とは言え、作れば動くのは当たり前でして、作る前にしてどう調理してやろうかと考えます。と言うか、私は作って満足みたいな気でいたんですが、
序
mayumi「せっかくあるんだからArduinoか何かで制御しましょう」
私「え? これだけで楽しくてかわいいじゃん」
mayumi「いろいろ出来たら面白いじゃないですか」
私「そうだねぇ... このサイズではArduino(UNO)は入らないし、ESP32でラジコンにするのもありきたりだし... Arduino nanoくらいなら入るかな。あ、こんなところにMaix Bitがあるわ」
mayumi「画像認識とかついてたら凄いじゃないですか」
私「ちょっと思うところあるんで、これでいろいろやってみるわ」
というわけで、Maix Bitを組み込むことを考えてみます。つまり、件の「ねずみ」にMaix Bitを組み込んだ自律ロボットを作ることにします。うまく出来たら「改造キット」として頒布することにしましょう。
まずは作ってみる
ということで、まずはベアな状態のものを作ってみましょう。
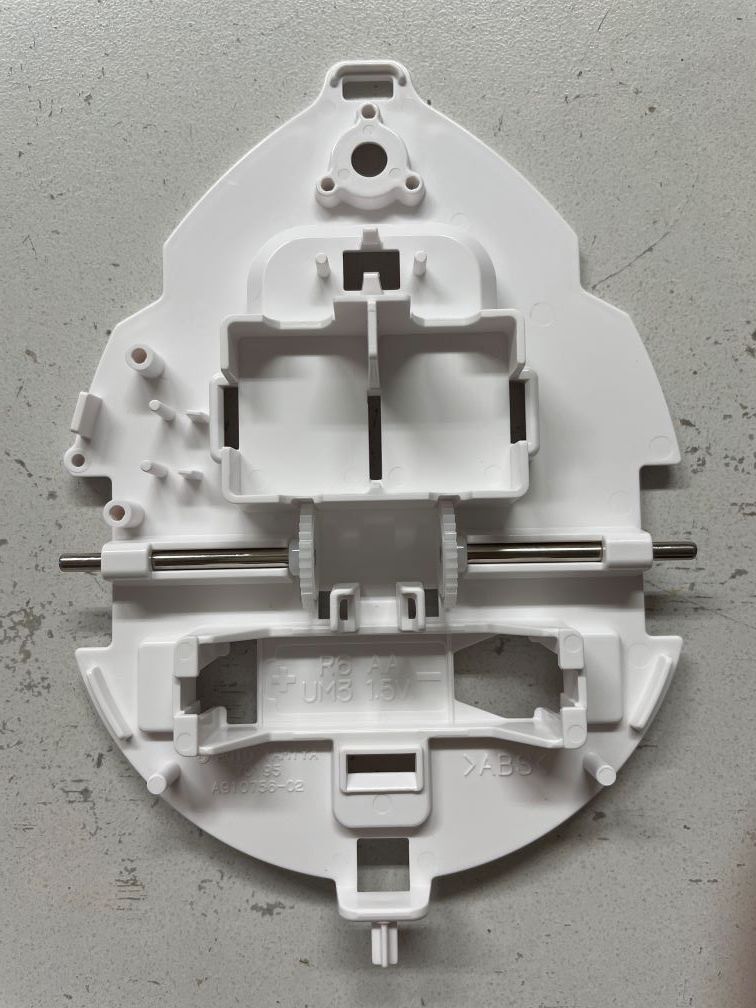
まずは中身
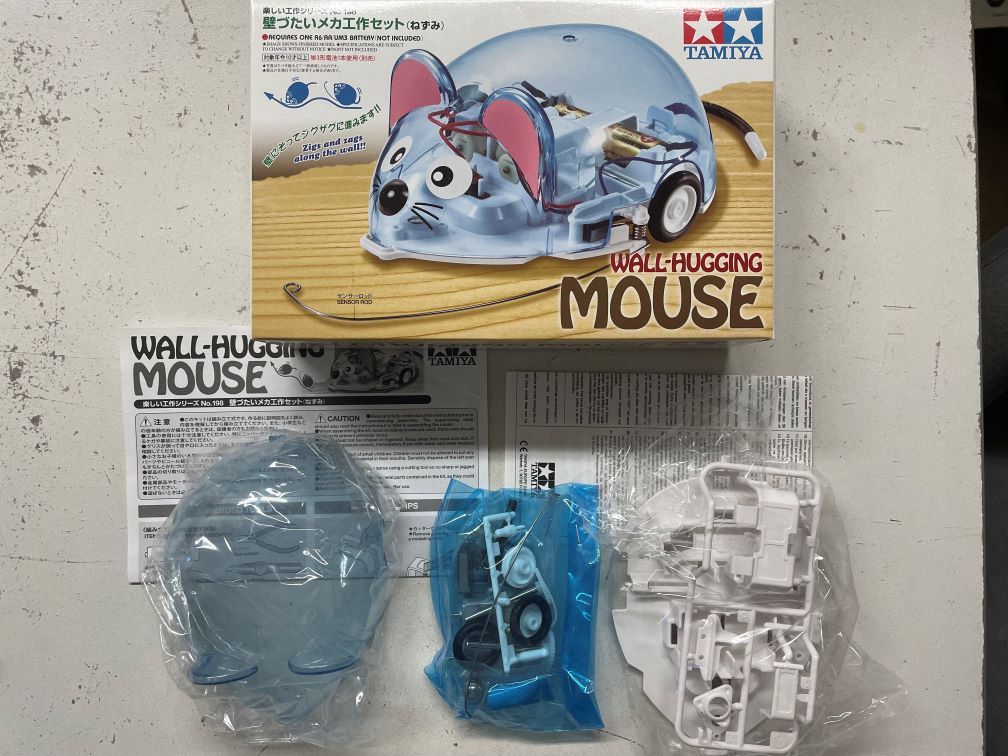
こんな感じです。普通のプラモデルと比べると、格段にパーツが少ないですね。これならまぁ一瞬で作れるかも?
とか言ってしまうのが工作慣れしてる人の悪いところなんで、要所要所の画像を入れて作るところの画像でも。
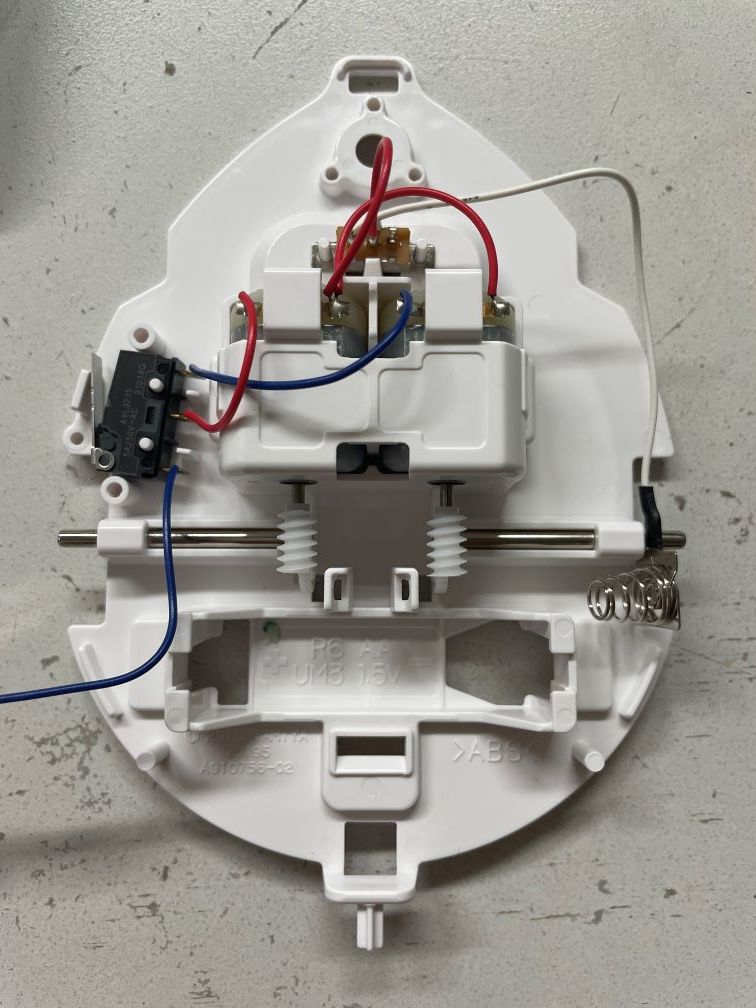
まずは電装品
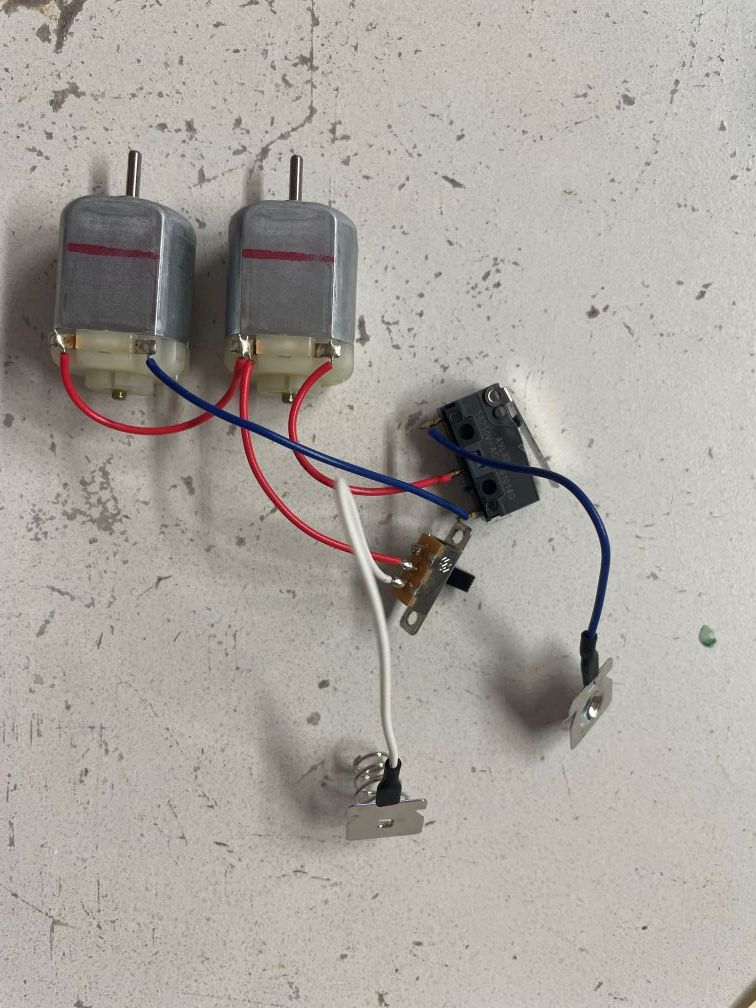
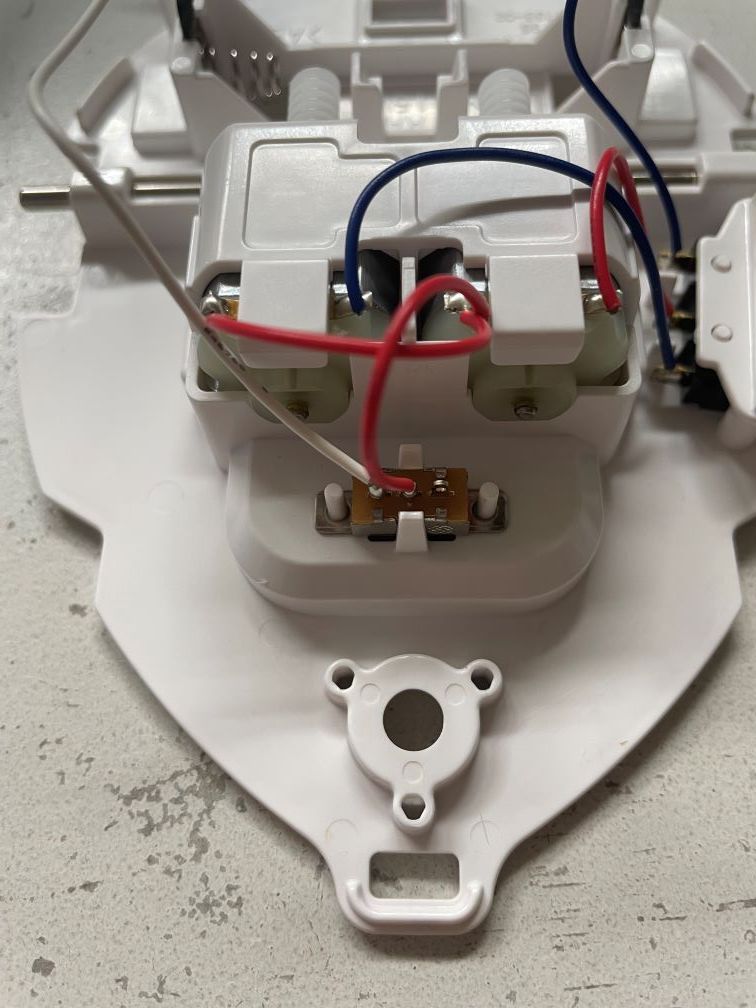
これがどんな回路かと言えば、
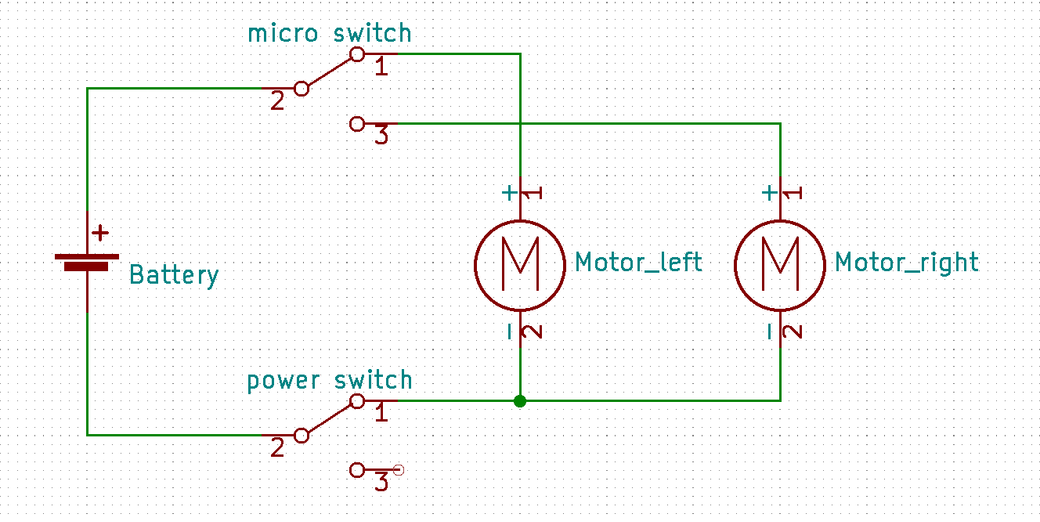
こんな感じです。
センサーロッド(触覚みたいな針金)が上のマイクロスイッチを動かしていて、センサーロッドが何かに触れると反対のモータを動かすようになっています。「壁」を電子回路なしで検出して、モータを制御するというメカですね。単純ですが、なかなか巧妙だなと思います。今だとマイコン、下手したらラズパイとか入れちゃったりするところを、電子回路全くなしでアイディア一発みたいなところは素敵だなと思います。
ということで、こういった仕掛けを考えた人に敬意を払いつつ、これで動く状態にしようと思います。
説明書通り、まずは駆動輪のメカの組み立て
これはまぁ迷うところはありませんね。入れるだけ。歯車の位置はちゃんと決まるように作られていますから、不器用さんでも安心。
次はモータのとりつけ
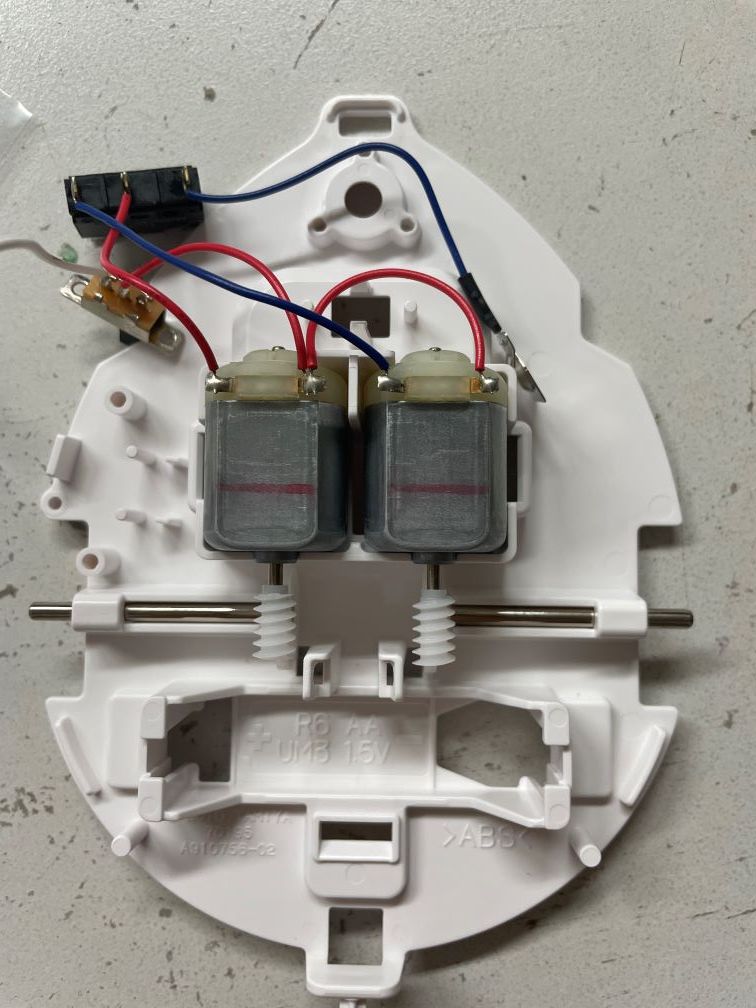
モータについているウォームギアは説明書通りに治具を使うと、挿入の深さが揃っていい感じになります。「治具」と言ってもプラ部品のライナーにちょっと細工してあるだけなんですけどね。子供の頃のプラモにそーゆーのがあったら良かったのにと思います。
モータを置いても置くだけでガタガタして心配になるのですが、次に蓋をするとちゃんと決まります。
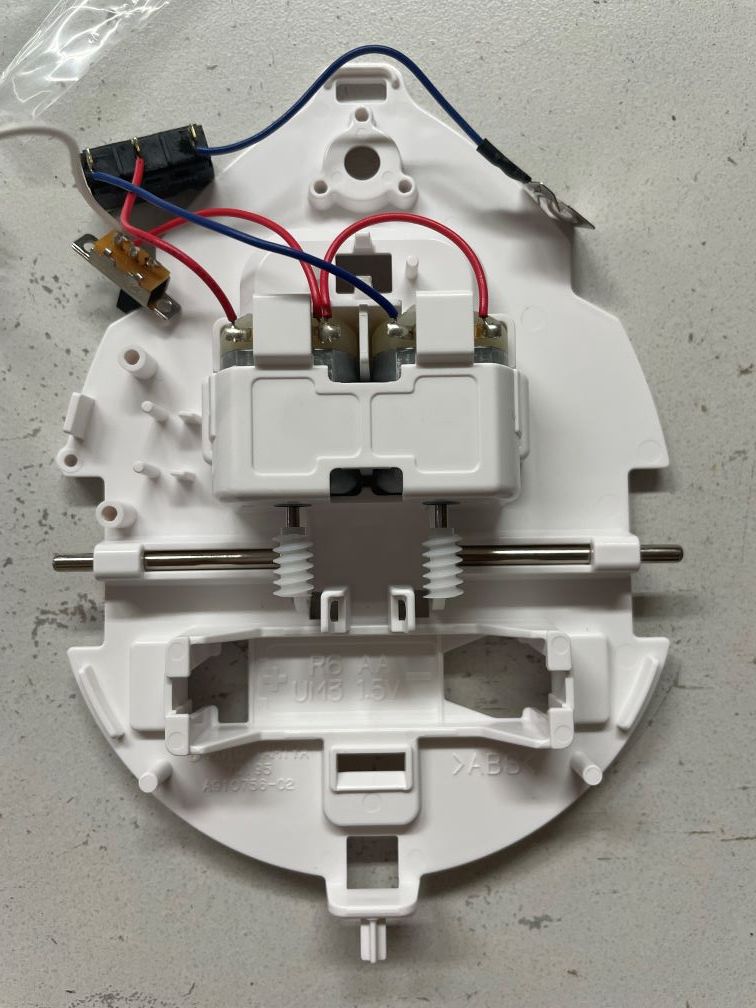
モータのガタつきはなくなりました。
スイッチを止めます。
実は上の写真はスライドスイッチの向きを逆にしていました。まぁ爪で押さえるくらいで外せるので問題はないし、何ならそのままでも表示が反転してるだけでそんなに困るわけでもないんですが、最初のはちゃんとしておかないと。
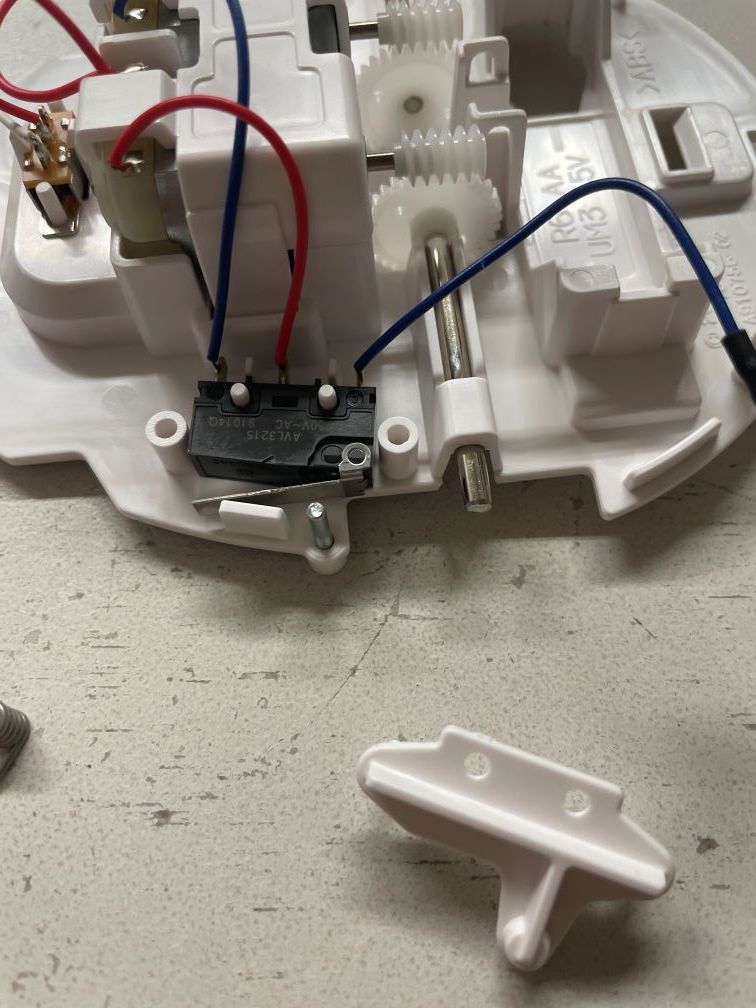
センサーロッドをひっかけるためのシャフトをつけます。説明書はモノクロ線画なので、他に似たような部品があると一瞬悩みます。いまどきなんだからカラー写真にすればいいのになと思ったので、画像多めに説明してます。
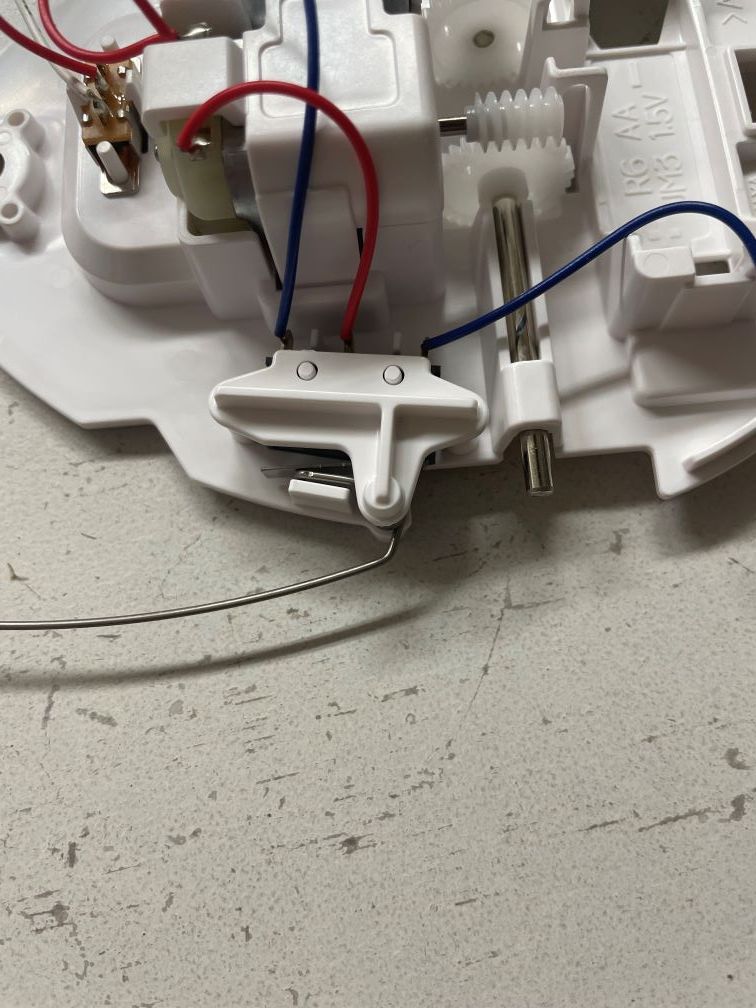
こんな感じになります。
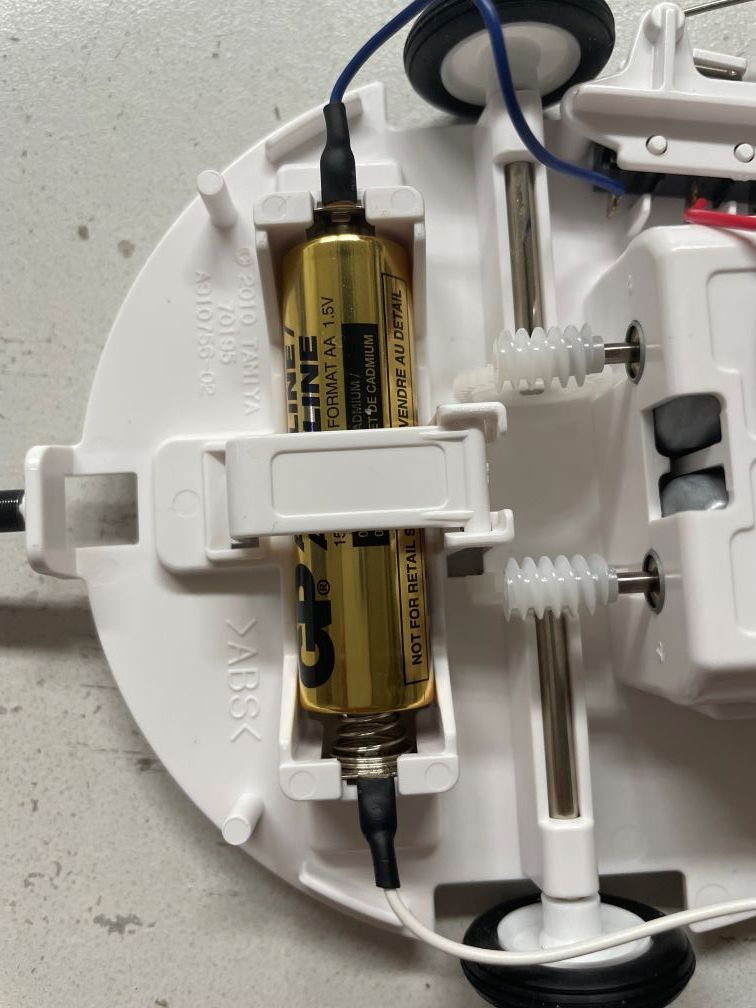
次は電池箱の接点を固定せよとのこと。
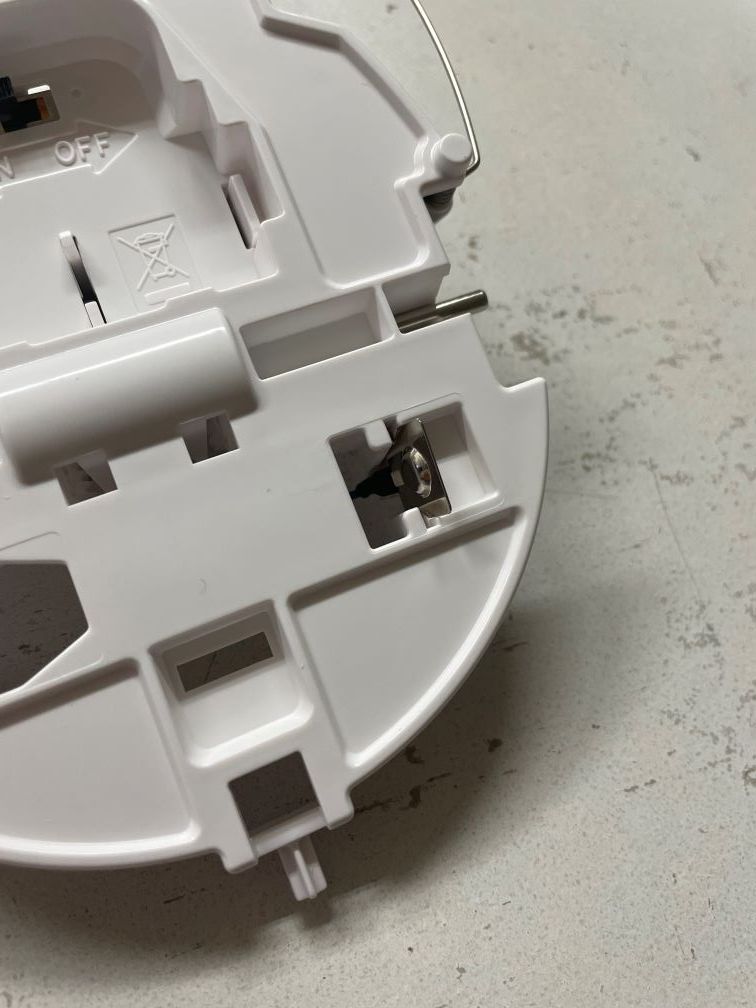
これも説明書だとイマイチわかりにくいかも知れないんですが、一度この穴から接点を出して、狭い方の穴に差し込みます。奥まで入れれば、いい子してくれます。反対側も同様です。
間違えていたスイッチの向きを正しくします。

前輪(?)をつけます。多分これはパチンコ玉だな。
個人的にはこの手の車体にありがち(ロボットカーによくある)のこの機構、あまり好きではありません。向きが自在にしやすいしコンパクトなのは良いんですが、床の凸凹にひっかかりやすいです。遊ぶ時には平らなところを探しましょう。タイルカーペットとかではスムーズさに欠けてしまいます。
駆動輪を組み立てます。

車輪つけてからゴムをつけたりしないようにしましょう。やりにくいだけじゃなくて、壊したりする元ですからね。
尻尾を組み立てます。

最初ですからね。動作に関係ないこーゆーのもちゃんと組み立てます。
この尻尾の白い部分、長いのと短いのが入っています。これは長い方をつけましたが、そうすると当然ながら短い方が余ってしまいます。そーゆーものみたいです。最後に部品が余ったと言ってあわてる必要はありません。
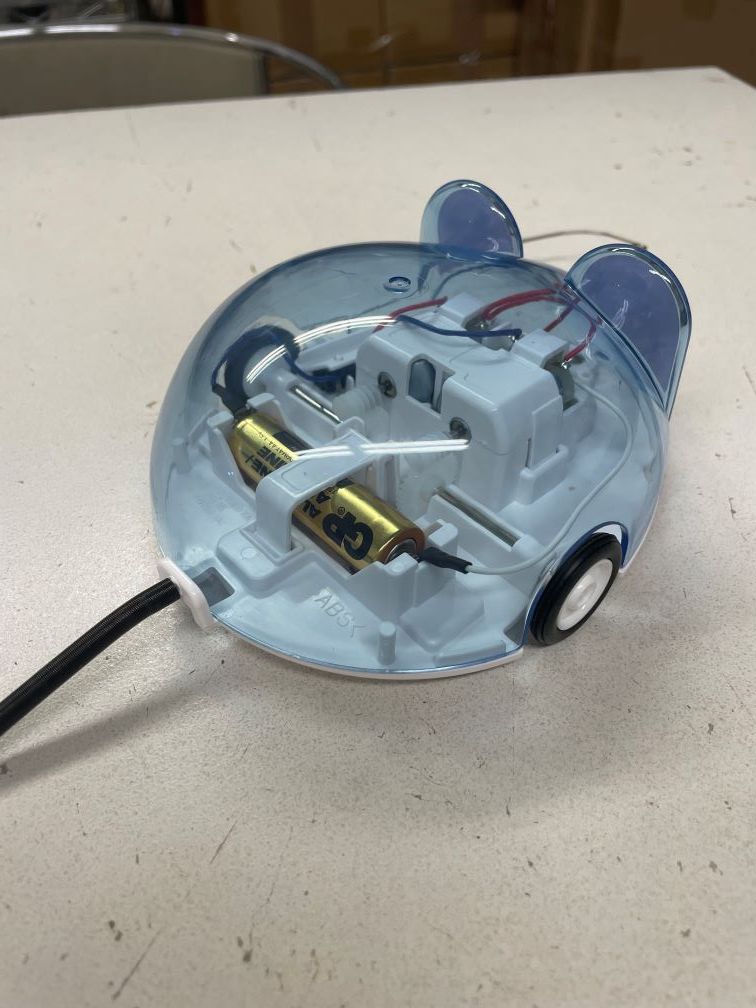
電池を入れて止めたところ。ちゃんと電池が外れないような機構がついているのが良いですね。市販の電池箱だと、電池をひっかけるようなベロがついてたりするんですが、あれよりもしっかりした感じです。
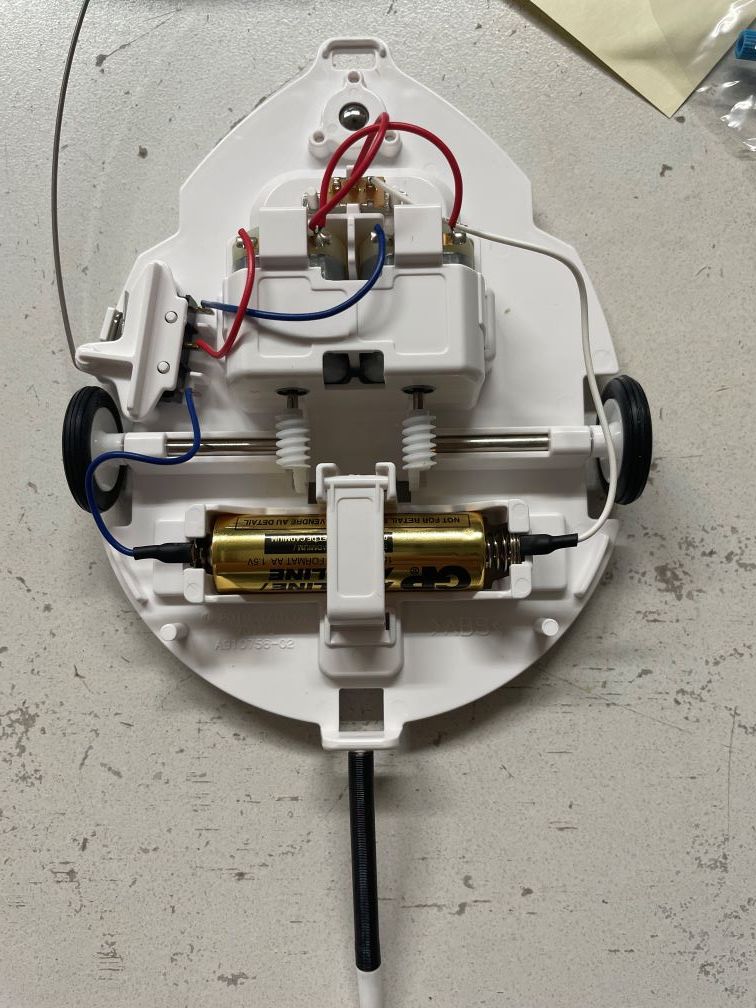
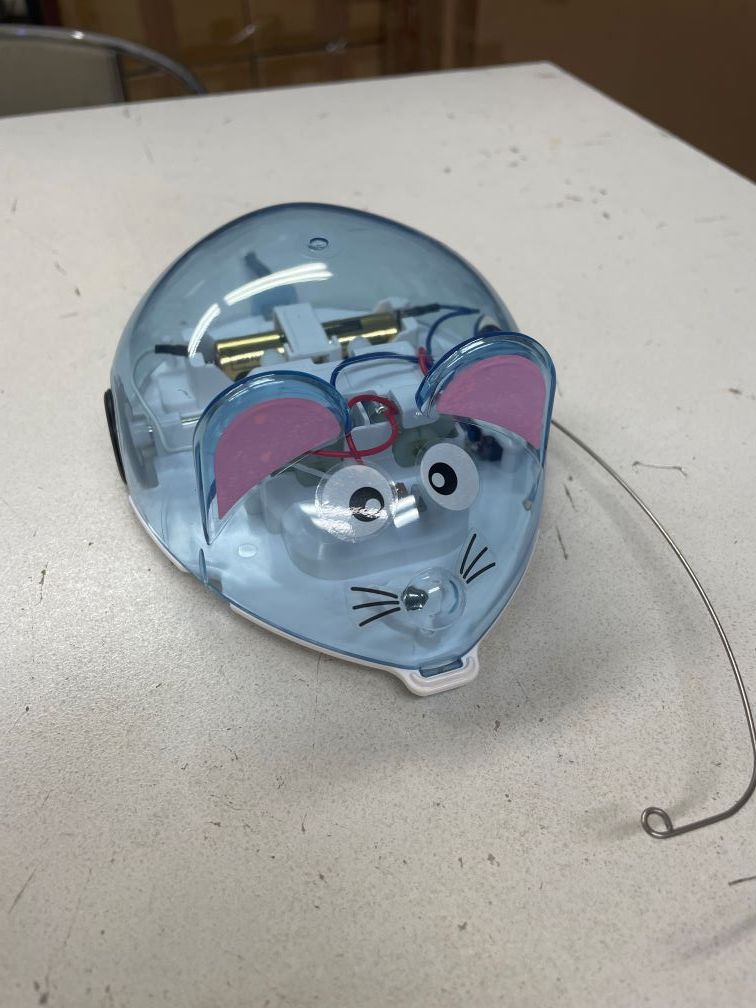
ということで、メカ部分は完成しました。結構綺麗ですね。
カバーをかけてみました。配線がゴチャゴチャしてないとは言え、なんかメカメカしい感じが見えちゃうのはどうも好きではありません。いや、もっとびっちり電子回路が入っていれば、それはそれで美しいと思うんですが、これは何やら中途半端。この辺は後で何とかしましょう。
顔のデカールをつけてみました。貼るの下手くそなんでイマイチですね。
説明書通りにやってもデカールが余るのは、目の表情が2パターンあるからのようです。目はまた後で動くのに換えちゃうつもり。
完成したところです。
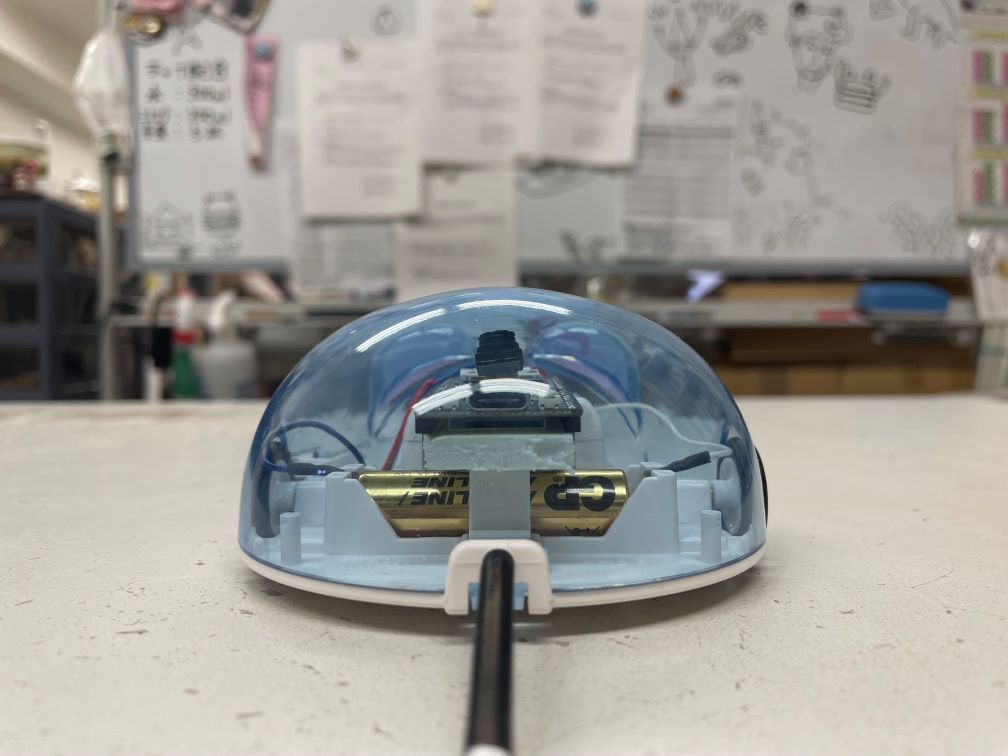
後ろ姿
割とかわいくて気に入ってます。
実際に動かしてみると、ギアの減速比のせいか電池電圧のせいか、結構ノロノロと動きます。その方が制御は楽ですし遊びやすいとも思うのですが、「ねずみ」なのでもうちょっと素早く動いてもいいんじゃないかと思ったりもします。この辺はまた後で考えたいと思います。
お楽しみはこれから
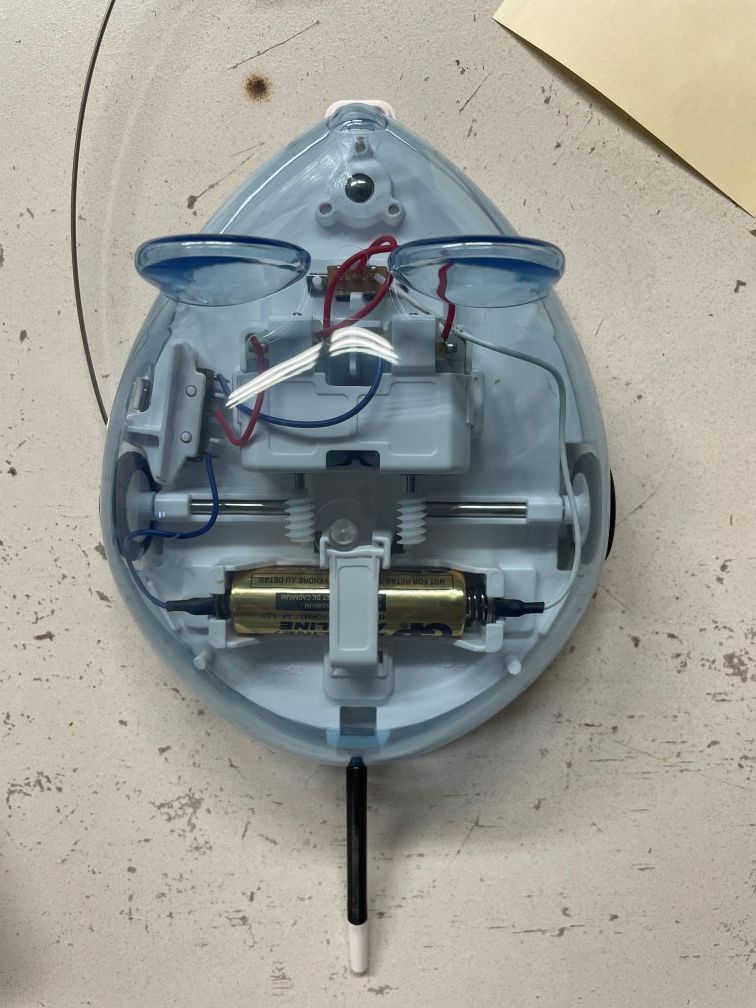
最初に書いたように、この子にはMaix Bitを載せる予定です。それが実際に出来るかどうかを試してみました。
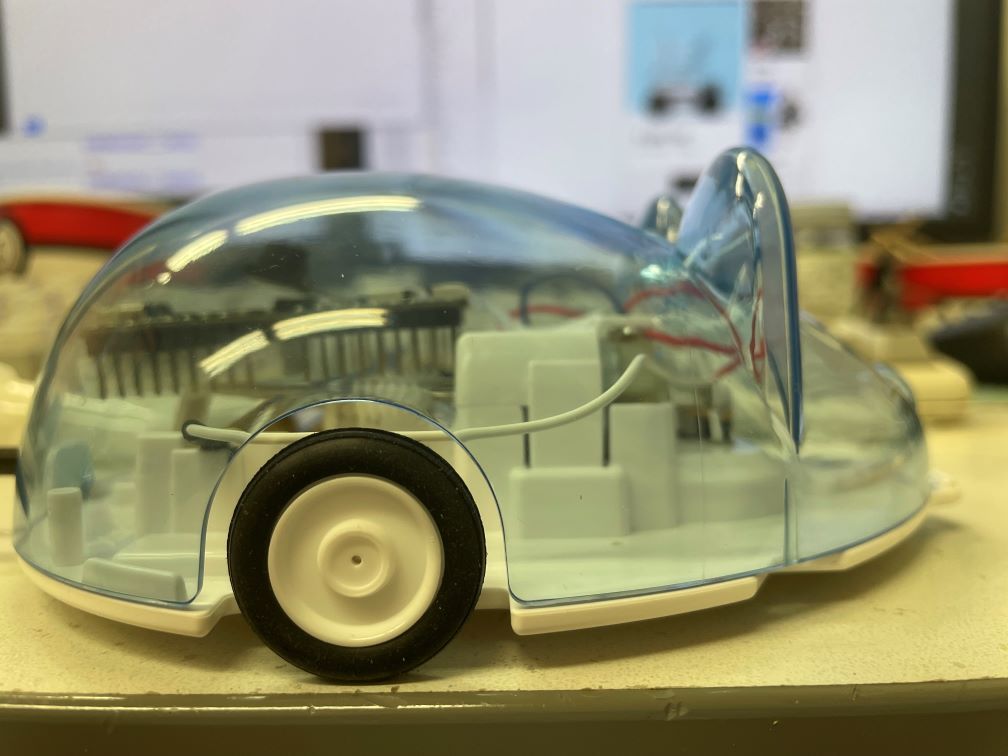
こんな感じになりました。あまり無理しなくても納まる感じです。これで第一関門はクリアかなと思います。これがダメとなると、いきなりM1とかでボード起こすことになって、ハードル上がってしまいますからね。最後にはそうするつもりですが、最初はちょっとね。
途中でちょっと書いたように、電池が1本でちょっとパワーが足りない感じです。と同時に、Maix Bitは最低でも3.3V以上出来れば5V欲しいボードです。モータドライバをディスクリートで作るにしてもICを使うにしても1.5Vではちょっと難しく、最低でも3Vくらいは欲しいところです。とか考えると、最低でも乾電池は2本入れたいところです。それでも足りない部分をどうするか、あるいはあっさりLiポリマー電池(3.7V)を載せてしまうか。この辺も考えどころです。
また、最後の写真見てわかるかも知れませんが、この取りつけだとカメラがかなり後ろになってしまいます。そうすると「耳」が邪魔になってしまって、視界が狭くなってしまいます。この辺も何とかしたいところです。
と言うところで、今回はこれまでにしておきます。続きはまた次回に。
タミヤ 楽しい工作シリーズ No.198 壁づたいメカ工作 (ねずみ) 70198

Sipeed Maix Bit

